Publications
Selected publications from our research group
Projects
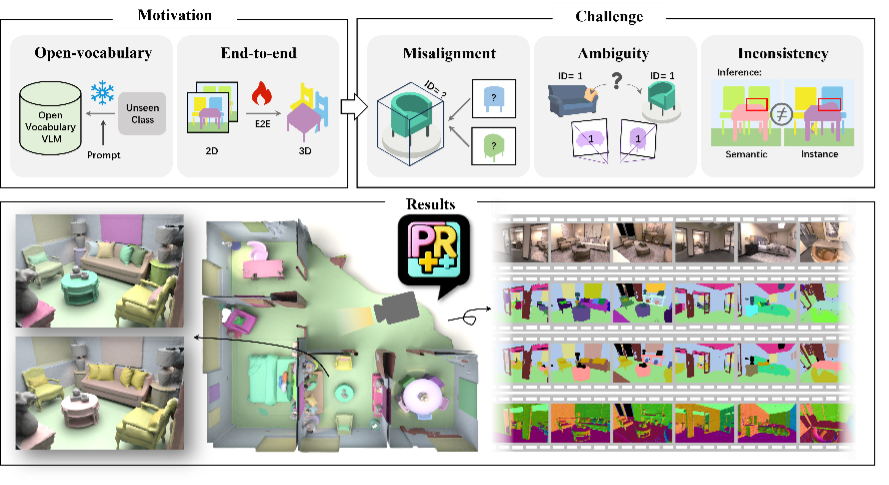
A Survey on Global LiDAR Localization: Challenges, Advances and Open Problems
Huan Yin, Xuecheng Xu, Sha Lu, Xieyuanli Chen, Rong Xiong, Shaojie Shen, Cyrill Stachniss, Yue Wang
International Journal of Computer Vision, 2024
[Paper]
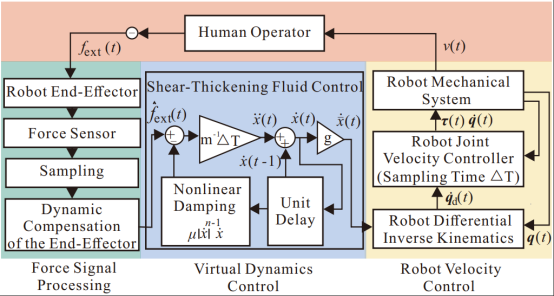
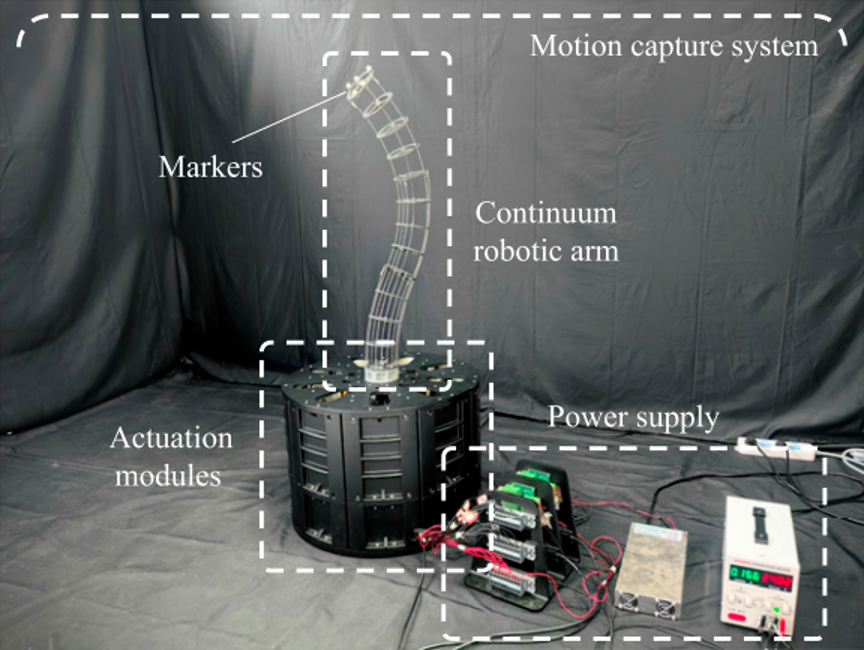
Compliance while resisting: A shear-thickening fluid controller for physical human-robot interaction
Lu Chen, Lipeng Chen, Xiangchi Chen, Haojian Lu, Yu Zheng, Jun Wu, Yue Wang, Zhengyou Zhang, Rong Xiong
The International Journal of Robotics Research, 2024
[Paper]
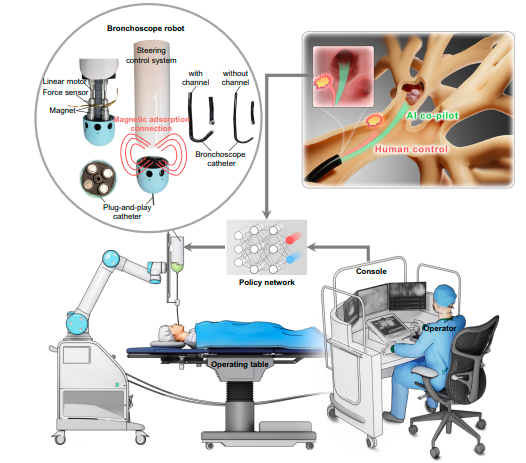
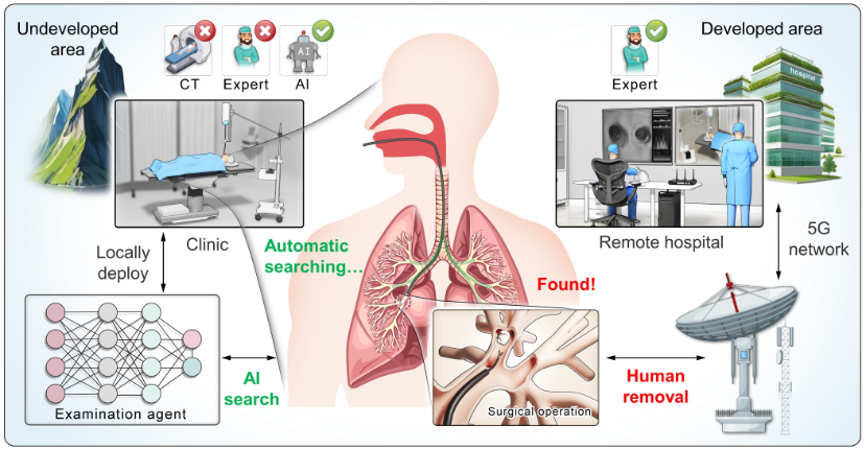
AI co-pilot bronchoscope robot
Jingyu Zhang, Lilu Liu, Pingyu Xiang, Qin Fang, Xiuping Nie, Honghai Ma, Jian Hu, Rong Xiong, Yue Wang, Haojian Lu
Nature Communications, 2024
[Paper]
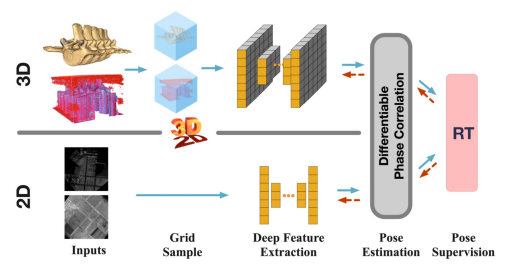
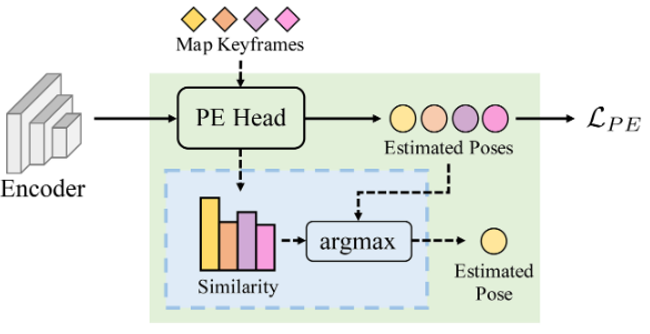
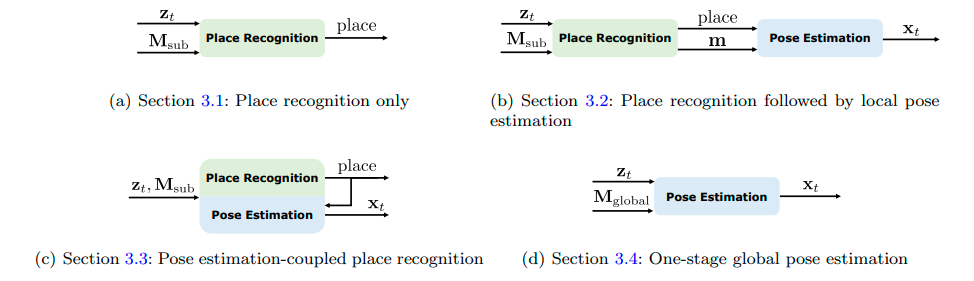
DPCN++: Differentiable Phase Correlation Network for Versatile Pose Registration
Zexi Chen, Yiyi Liao, Haozhe Du, Haodong Zhang, Xuecheng Xu, Haojian Lu, Rong Xiong, Yue Wang
IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023
[Paper]